Qu'est-ce que le contrôle PI et le facteur K?
Les applications typiques dans lesquelles le contrôle PI peut être utilisé sont les suivantes :
- Contrôler la vitesse du ventilateur pour maintenir le volume de débit d'air constant. Cela peut être intéressant lorsque l'apport d'air frais dans différentes pièces est variable et qu'un ventilateur central est utilisé.
- Contrôler la position d'une vanne de régulation pour maintenir le volume de débit d'air constant dans un espace donné lorsque l'apport d'air frais est variable.
Un algorithme de contrôle PI utilise une combinaison de contrôle proportionnel et intégral.
-
-
Action Proportionnelle (P) : La sortie est proportionnelle à l'écart entre la valeur mesurée et la valeur de consigne. Plus cet écart est grand, plus la correction appliquée est importante.
-
Action Intégrale (I) : Cette action s'intéresse à la somme des écarts sur le temps, corrigeant ainsi les erreurs persistantes à long terme.
Contrôle proportionnel - Kp
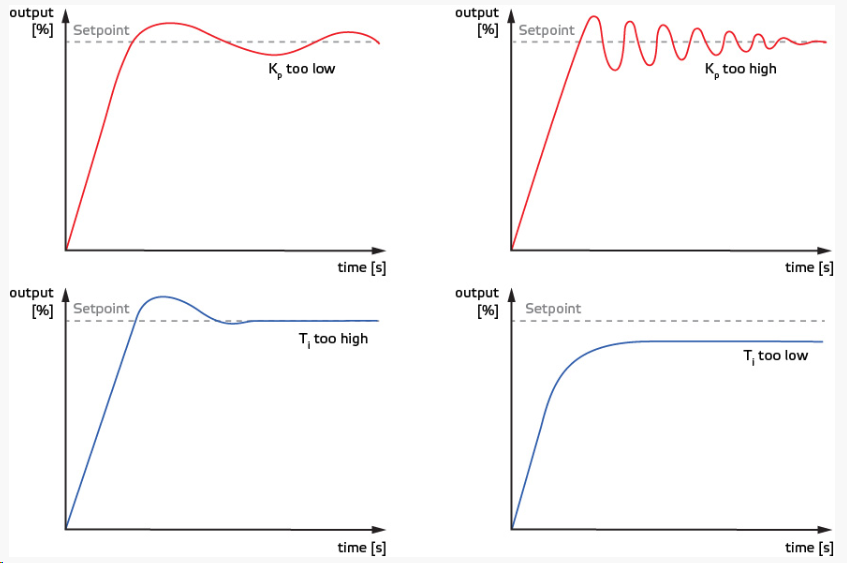
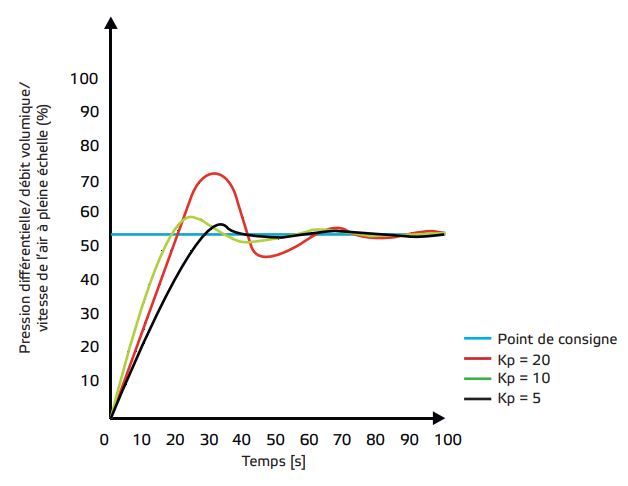
P représente le contrôle proportionnel et détermine l'ampleur de la correction calculée. Plus la valeur mesurée est proche du point de consigne, plus la correction sera faible. Le signal de sortie d'un contrôleur proportionnel est proportionnel à l'erreur. Une faible valeur de Kp entraînera une réaction lente. Une valeur de Kp plus élevée rendra le contrôleur plus agressif dans sa réponse aux écarts par rapport au point de consigne. Ainsi, la différence entre la valeur mesurée et la valeur désirée sera compensée plus rapidement. Si la valeur de Kp est réglée trop haute, des oscillations se produiront et la valeur mesurée fluctuera constamment autour de la valeur désirée. Avec un contrôleur PI, il est important d'optimiser d'abord la valeur de Kp. L'ajustement fin peut ensuite être effectué en réglant la valeur de Ti.
Contrôle intégral - Ti
I représente le contrôle intégral et examine comment l'écart entre le point de consigne désiré et la valeur mesurée évolue dans le temps lorsqu'on applique la correction. L'action intégrale est utilisée pour éliminer les décalages et peut être considérée comme une valeur d'entrée ajustable pour la boucle de contrôle PI.
Kp et Ti sont deux paramètres pouvant être réglés manuellement dans le contrôleur PI. Lorsque la fonction d'auto-tuning est activée (et disponible), le contrôleur PI calcule les valeurs optimales de Kp et Ti en fonction de la réponse en temps réel du processus aux différentes valeurs de contrôle.
Ce diagramme montre l'effet des différents réglages de Kp et Ti :