Vad är 'PI-kontroll'?
PI-reglering är en förkortning av Proportional Integral-reglering. PI-reglering är en vanlig metod i styrsystem för att korrigera felet mellan det önskade börvärdet och det faktiska värdet baserat på någon typ av återkoppling, t.ex. en givarmätning. PI-regulatorn beräknar en korrigering genom att ta skillnaden mellan det önskade börvärdet och det uppmätta värdet. Om alla parametrar är korrekt inställda styr PI-algoritmen systemet så att det uppmätta värdet motsvarar det önskade börvärdet med minimal fördröjning och överskjutning.
Typiska tillämpningar där PI-styrning kan användas är
- Reglering av fläkthastigheten för att hålla luftflödesvolymen konstant. Detta kan vara intressant när friskluftstillförseln i olika rum är variabel och en central tilluftsfläkt används.
- Reglering av ett spjällblads position för att hålla luftflödesvolymen till ett visst utrymme konstant när friskluftstillförseln varierar.
En PI-styralgoritm använder en kombination av proportionell och integrerad styrning.
Typiska tillämpningar där PI-styrning kan användas är
- Reglering av fläkthastigheten för att hålla luftflödesvolymen konstant. Detta kan vara intressant när friskluftstillförseln i olika rum är variabel och en central tilluftsfläkt används.
- Reglering av ett spjällblads position för att hålla luftflödesvolymen till ett visst utrymme konstant när friskluftstillförseln varierar.
En PI-styralgoritm använder en kombination av proportionell och integrerad styrning.
Proportionell kontroll - Kp
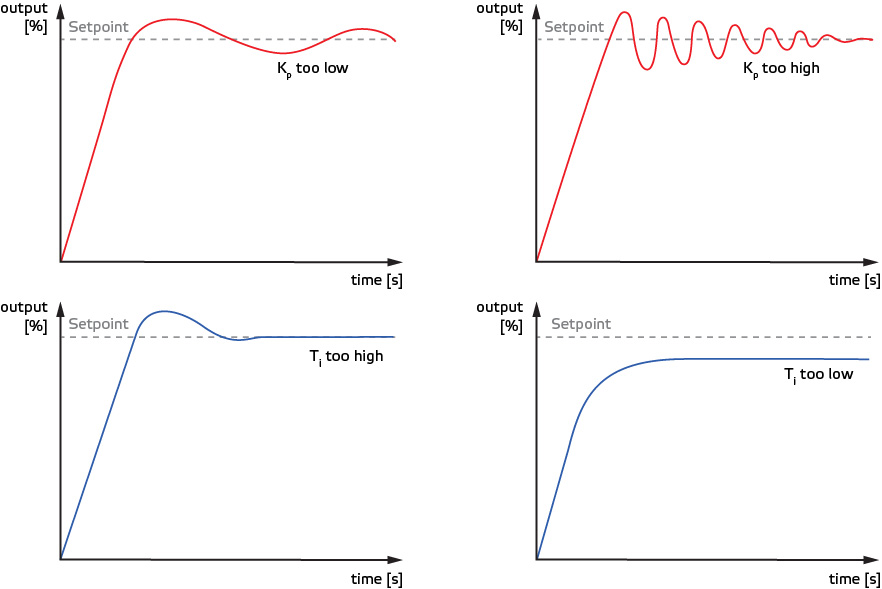
P står för Proportionell styrning och representerar storleken på den beräknade korrigeringen. Ju närmare börvärdet det uppmätta värdet ligger, desto mindre blir korrigeringen. Utsignalen från en proportionell regulator är proportionell mot felet. Ett lågt Kp-värde ger en långsam reaktion. Ett högre Kp-värde gör regulatorn mer aggressiv när det gäller att reagera på fel som ligger långt från börvärdet. Skillnaden mellan det uppmätta värdet och det önskade värdet kommer därför att kompenseras snabbare. Om Kp-värdet ställs in för högt uppstår oscillation. Det uppmätta värdet kommer hela tiden att fluktuera kring det önskade värdet. Med en PI-regulator är det viktigt att alltid optimera Kp-värdet först. Finjusteringen kan sedan göras genom att justera Ti-värdet.
Integral reglering - Ti
I står för Integral control och tittar på hur skillnaden mellan det önskade börvärdet och det uppmätta värdet utvecklas i tiden när korrigeringen tillämpas. Integralreglering används för att ta bort offset och kan ses som ett justerbart ingångsvärde för PI-regelslingan.
P står för Proportionell styrning och representerar storleken på den beräknade korrigeringen. Ju närmare börvärdet det uppmätta värdet ligger, desto mindre blir korrigeringen. Utsignalen från en proportionell regulator är proportionell mot felet. Ett lågt Kp-värde ger en långsam reaktion. Ett högre Kp-värde gör regulatorn mer aggressiv när det gäller att reagera på fel som ligger långt från börvärdet. Skillnaden mellan det uppmätta värdet och det önskade värdet kommer därför att kompenseras snabbare. Om Kp-värdet ställs in för högt uppstår oscillation. Det uppmätta värdet kommer hela tiden att fluktuera kring det önskade värdet. Med en PI-regulator är det viktigt att alltid optimera Kp-värdet först. Finjusteringen kan sedan göras genom att justera Ti-värdet.
Integral reglering - Ti
I står för Integral control och tittar på hur skillnaden mellan det önskade börvärdet och det uppmätta värdet utvecklas i tiden när korrigeringen tillämpas. Integralreglering används för att ta bort offset och kan ses som ett justerbart ingångsvärde för PI-regelslingan.
Både Kp och Ti är parametrar som kan ställas in manuellt i PI-regulatorn. När den är aktiverad (och tillgänglig) beräknar PI-regulatorns auto-tune-funktion de optimala Kp- och Ti-värdena baserat på processens svar i realtid på olika reglervärden.
Detta diagram visar effekten av olika Kp- och Ti-inställningar: